1
0.8
0.6
0.4
0.2
z
0
-0.2
-10
-5
-0.4
-10
0
-5
x
0
5
y
5
10
10
Vector
Calculus
Michael Corral
Vector Calculus
Michael Corral
Schoolcraft College
About the author:
Michael Corral is an Adjunct Faculty member of the Department of Mathematics at
Schoolcraft College. He received a B.A. in Mathematics from the University of California
at Berkeley, and received an M.A. in Mathematics and an M.S. in Industrial & Operations
Engineering from the University of Michigan.
This text was typeset in LATEX 2 ε with the KOMA-Script bundle, using the GNU Emacs text
editor on a Fedora Linux system. The graphics were created using MetaPost, PGF, and
Gnuplot.
Copyright © 2008 Michael Corral.
Permission is granted to copy, distribute and/or modify this document under the terms of the
GNU Free Documentation License, Version 1.2 or any later version published by the Free
Software Foundation; with no Invariant Sections, no Front-Cover Texts, and no Back-Cover
Texts. A copy of the license is included in the section entitled “GNU Free Documentation
License”.
Preface
This book covers calculus in two and three variables. It is suitable for a one-semester course,
normally known as “Vector Calculus”, “Multivariable Calculus”, or simply “Calculus III”.
The prerequisites are the standard courses in single-variable calculus (a.k.a. Calculus I and
II).
I have tried to be somewhat rigorous about proving results. But while it is important for
students to see full-blown proofs - since that is how mathematics works - too much rigor and
emphasis on proofs can impede the flow of learning for the vast majority of the audience at
this level. If I were to rate the level of rigor in the book on a scale of 1 to 10, with 1 being
completely informal and 10 being completely rigorous, I would rate it as a 5.
There are 420 exercises throughout the text, which in my experience are more than
enough for a semester course in this subject. There are exercises at the end of each sec-
tion, divided into three categories: A, B and C. The A exercises are mostly of a routine
computational nature, the B exercises are slightly more involved, and the C exercises usu-
ally require some effort or insight to solve. A crude way of describing A, B and C would be
“Easy”, “Moderate” and “Challenging”, respectively. However, many of the B exercises are
easy and not all the C exercises are difficult.
There are a few exercises that require the student to write his or her own computer pro-
gram to solve some numerical approximation problems (e.g. the Monte Carlo method for
approximating multiple integrals, in Section 3.4). The code samples in the text are in the
Java programming language, hopefully with enough comments so that the reader can figure
out what is being done even without knowing Java. Those exercises do not mandate the use
of Java, so students are free to implement the solutions using the language of their choice.
While it would have been simple to use a scripting language like Python, and perhaps even
easier with a functional programming language (such as Haskell or Scheme), Java was cho-
sen due to its ubiquity, relatively clear syntax, and easy availability for multiple platforms.
Answers and hints to most odd-numbered and some even-numbered exercises are pro-
vided in Appendix A. Appendix B contains a proof of the right-hand rule for the cross prod-
uct, which seems to have virtually disappeared from calculus texts over the last few decades.
Appendix C contains a brief tutorial on Gnuplot for graphing functions of two variables.
This book is released under the GNU Free Documentation License (GFDL), which allows
others to not only copy and distribute the book but also to modify it. For more details, see
the included copy of the GFDL. So that there is no ambiguity on this matter, anyone can
make as many copies of this book as desired and distribute it as desired, without needing
my permission. The PDF version will always be freely available to the public at no cost
(go to http://www.mecmath.net). Feel free to contact me at mcorral@schoolcraft.edu for iii
iv
Preface
any questions on this or any other matter involving the book (e.g. comments, suggestions,
corrections, etc). I welcome your input.
Finally, I would like to thank my students in Math 240 for being the guinea pigs for the
initial draft of this book, and for finding the numerous errors and typos it contained.
January 2008
MICHAEL CORRAL
Contents
iii
1
1.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1
1.2 Vector Algebra . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9
1.3 Dot Product . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.4 Cross Product . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
1.5 Lines and Planes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
1.6 Surfaces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
1.7 Curvilinear Coordinates . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
1.8 Vector-Valued Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
1.9 Arc Length . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
2 Functions of Several Variables
65
2.1 Functions of Two or Three Variables . . . . . . . . . . . . . . . . . . . . . . . . . . 65
2.2 Partial Derivatives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
2.3 Tangent Plane to a Surface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
2.4 Directional Derivatives and the Gradient . . . . . . . . . . . . . . . . . . . . . . . 78
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
2.6 Unconstrained Optimization: Numerical Methods . . . . . . . . . . . . . . . . . . 89
2.7 Constrained Optimization: Lagrange Multipliers . . . . . . . . . . . . . . . . . . 96
101
3.1 Double Integrals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
3.2 Double Integrals Over a General Region . . . . . . . . . . . . . . . . . . . . . . . . 105
3.3 Triple Integrals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
3.4 Numerical Approximation of Multiple Integrals . . . . . . . . . . . . . . . . . . . 113
3.5 Change of Variables in Multiple Integrals . . . . . . . . . . . . . . . . . . . . . . . 117
3.6 Application: Center of Mass . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
3.7 Application: Probability and Expected Value . . . . . . . . . . . . . . . . . . . . . 128
135
4.1 Line Integrals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135
4.2 Properties of Line Integrals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143
4.3 Green’s Theorem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 150
v
vi
Contents
4.4 Surface Integrals and the Divergence Theorem . . . . . . . . . . . . . . . . . . . . 156
4.5 Stokes’ Theorem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165
4.6 Gradient, Divergence, Curl and Laplacian . . . . . . . . . . . . . . . . . . . . . . . 177
187
Answers and Hints to Selected Exercises
189
Proof of the Right-Hand Rule for the Cross Product
192
196
GNU Free Documentation License
201
209
210
1 Vectors in Euclidean Space
1.1 Introduction
In single-variable calculus, the functions that one encounters are functions of a variable
(usually x or t) that varies over some subset of the real number line (which we denote by R).
For such a function, say, y = f ( x), the graph of the function f consists of the points ( x, y) =
( x, f ( x)). These points lie in the Euclidean plane, which, in the Cartesian or rectangular
coordinate system, consists of all ordered pairs of real numbers ( a, b). We use the word
“Euclidean” to denote a system in which all the usual rules of Euclidean geometry hold. We
denote the Euclidean plane by R2; the “2” represents the number of dimensions of the plane.
The Euclidean plane has two perpendicular coordinate axes: the x-axis and the y-axis.
In vector (or multivariable) calculus, we will deal with functions of two or three variables
(usually x, y or x, y, z, respectively). The graph of a function of two variables, say, z = f ( x, y), lies in Euclidean space, which in the Cartesian coordinate system consists of all ordered
triples of real numbers ( a, b, c). Since Euclidean space is 3-dimensional, we denote it by R3.
The graph of f consists of the points ( x, y, z) = ( x, y, f ( x, y)). The 3-dimensional coordinate system of Euclidean space can be represented on a flat surface, such as this page or a black-board, only by giving the illusion of three dimensions, in the manner shown in Figure 1.1.1.
Euclidean space has three mutually perpendicular coordinate axes ( x, y and z), and three
mutually perpendicular coordinate planes: the x y-plane, yz-plane and xz-plane (see Figure
z
z
c
P( a, b, c)
yz-plane
y
b
xz-plane
y
0
0
a
x y-plane
x
x
Figure 1.1.1
Figure 1.1.2
1
2
CHAPTER 1. VECTORS IN EUCLIDEAN SPACE
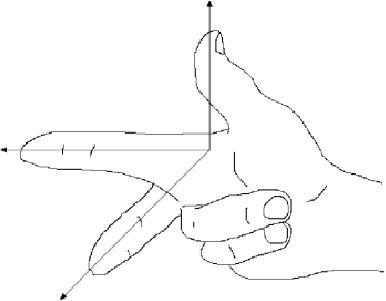
The coordinate system shown in Figure 1.1.1 is known as a right-handed coordinate
system, because it is possible, using the right hand, to point the index finger in the positive
direction of the x-axis, the middle finger in the positive direction of the y-axis, and the thumb
in the positive direction of the z-axis, as in Figure 1.1.3.
z
x
0
y
Figure 1.1.3
Right-handed coordinate system
An equivalent way of defining a right-handed system is if you can point your thumb up-
wards in the positive z-axis direction while using the remaining four fingers to rotate the
x-axis towards the y-axis. Doing the same thing with the left hand is what defines a left-
handed coordinate system. Notice that switching the x- and y-axes in a right-handed
system results in a left-handed system, and that rotating either type of system does not
change its “handedness”. Throughout the book we will use a right-handed system.
For functions of three variables, the graphs exist in 4-dimensional space (i.e. R4), which
we can not see in our 3-dimensional space, let alone simulate in 2-dimensional space. So
we can only think of 4-dimensional space abstractly. For an entertaining discussion of this
subject, see the book by ABBOTT.1
So far, we have discussed the position of an object in 2-dimensional or 3-dimensional space.
But what about something such as the velocity of the object, or its acceleration? Or the
gravitational force acting on the object? These phenomena all seem to involve motion and
direction in some way. This is where the idea of a vector comes in.
1One thing you will learn is why a 4-dimensional creature would be able to reach inside an egg and remove the
yolk without cracking the shell!
1.1 Introduction
3
You have already dealt with velocity and acceleration in single-variable calculus. For
example, for motion along a straight line, if y = f ( t) gives the displacement of an object after
time t, then d y/ dt = f ′( t) is the velocity of the object at time t. The derivative f ′( t) is just a number, which is positive if the object is moving in an agreed-upon “positive” direction, and
negative if it moves in the opposite of that direction. So you can think of that number, which
was called the velocity of the object, as having two components: a magnitude, indicated
by a nonnegative number, preceded by a direction, indicated by a plus or minus symbol
(representing motion in the positive direction or the negative direction, respectively), i.e.
f ′( t) = ± a for some number a ≥ 0. Then a is the magnitude of the velocity (normally called
the speed of the object), and the ± represents the direction of the velocity (though the + is
usually omitted for the positive direction).
For motion along a straight line, i.e. in a 1-dimensional space, the velocities are also con-
tained in that 1-dimensional space, since they are just numbers. For general motion along a
curve in 2- or 3-dimensional space, however, velocity will need to be represented by a multi-
dimensional object which should have both a magnitude and a direction. A geometric object
which has those features is an arrow, which in elementary geometry is called a “directed line
segment”. This is the motivation for how we will define a vector.
Definition 1.1. A (nonzero) vector is a directed line segment drawn from a point P (called
its initial point) to a point Q (called its terminal point), with P and Q being distinct
−−→
points. The vector is denoted by PQ. Its magnitude is the length of the line segment,
−−→
denoted by PQ , and its direction is the same as that of the directed line segment. The
zero vector is just a point, and it is denoted by 0.
To indicate the direction of a vector, we draw an arrow from its initial point to its terminal
point. We will often denote a vector by a single bold-faced letter (e.g. v) and use the terms
“magnitude” and “length” interchangeably. Note that our definition could apply to systems
with any number of dimensions (see Figure 1.1.4 (a)-(c)).
z
y
R
S
Q
−→
−−→
Q
R
PQ
S
Q
v
P
R
−−→ P
y
x
0
−−→
−−→
0
−−→
RS
PQ
RS
v
P
S
0 R
P
Q
x
S
x
(a) One dimension
(b) Two dimensions
(c) Three dimensions
Figure 1.1.4
Vectors in different dimensions
4
CHAPTER 1. VECTORS IN EUCLIDEAN SPACE
A few things need to be noted about the zero vector. Our motivation for what a vector is
included the notions of magnitude and direction. What is the magnitude of the zero vector?
We define it to be zero, i.e. 0 = 0. This agrees with the definition of the zero vector as just
a point, which has zero length. What about the direction of the zero vector? A single point
really has no well-defined direction. Notice that we were careful to only define the direction
of a nonzero vector, which is well-defined since the initial and terminal points are distinct.
Not everyone agrees on the direction of the zero vector. Some contend that the zero vector
has arbitrary direction (i.e. can take any direction), some say that it has indeterminate
direction (i.e. the direction can not be determined), while others say that it has no direction.
Our definition of the zero vector, however, does not require it to have a direction, and we will
leave it at that.2
Now that we know what a vector is, we need a way of determining when two vectors are
equal. This leads us to the following definition.
Definition 1.2. Two nonzero vectors are equal if they have the same magnitude and the
same direction. Any vector with zero magnitude is equal to the zero vector.
By this definition, vectors with the same magnitude and direction but with different initial
points would be equal. For example, in Figure 1.1.5 the vectors u, v and w all have the same
magnitude
5 (by the Pythagorean Theorem). And we see that u and w are parallel, since
they lie on lines having the same slope 1 , and they point in the same direction. So u
2
= w,
even though they have different initial points. We also see that v is parallel to u but points
in the opposite direction. So u = v.
y
u
4
3
2
v
w
1
x
0
1
2
3
4
Figure 1.1.5
So we can see that there are an infinite number of vectors for a given magnitude and
direction, those vectors all being equal and differing only by their initial and terminal points.
Is there a single vector which we can choose to represent all those equal vectors? The answer
is yes, and is suggested by the vector w in Figure 1.1.5.
2In the subject of linear algebra there is a more abstract way of defining a vector where the concept of “direction”
is not really used. See ANTON and RORRES.
1.1 Introduction
5
Unless otherwise indicated, when speaking of “the vector” with a given magnitude and
direction, we will mean the one whose initial point is at the origin of the coordinate
system.
Thinking of vectors as starting from the origin provides a way of dealing with vectors in
a standard way, since every coordinate system has an origin. But there will be times when
it is convenient to consider a different initial point for a vector (for example, when adding
vectors, which we will do in the next section).
Another advantage of using the origin as the initial point is that it provides a